


2019.05.17
i-Constructionが解る!【5】ICT施工の現在 3次元データを使えば、施工現場も大きく変わる。今回はi-ConstructionにおけるICT施工の実際をみていこう。

ICT施工とは
i-Constructionでは、施工現場もICT化される。いわゆるICT建機を使った生産性の高い施工が求められるのだ。ICT建機を使った施工は、3次元設計データを元に行われるため、様々なメリットがうまれる。
(1)丁張りの削減
(2)補助員の削減
(3)短時間で正確に施工できる
手間と人員を削減できるほか、建機の無駄な動きが少なくなるため、燃料費も抑えられ、ひいてはCo2も削減できるのだ。
現在のところ、i-Construction(ICT土工)で指定されているICT建機は、上記ふたつの技術をブルドーザーとバックホーに搭載した下記の4種類だ。
ICT建機のふたつのアプローチ
連載第2回「i-Constructionを支える技術」でも触れているが、ICT建機には大きくふたつのアプローチがある。
・マシンコントロール
マシンコントロールは施工を半自動で行う技術だ。3次元設計データをコントローラーに入力しておけば、簡単なレバー操作だけで設計通りに施工が行える。難しい仕上げが初心者でも可能になるのだ。ただし、マシンコントロールに対応する建機は専用機であり、それなりにコストもかかる。
・マシンガイダンス
マシンガイダンスは、モニターに映し出された情報を使ってオペレーションを支援する技術。オペレータはモニターで確認しながらどこをどの程度施工した良いのかを確かめながら作業することができる。マシンコントロールと違い、一般的な建機に後付けできるシステムもある。
現在のところ、i-Constructionで指定されているICT建機は、上記ふたつの技術をブルドーザーとバックホーに搭載した下記の4種類だ。
・ブルドーザーマシンコントロール
マシンコントロールにより、排土板が自動制御されるもの。
・バックホーマシンコントロール
マシンコントロールにより、バケットが設計に沿って動くもの。
・ブルドーザーマシンガイダンス
排土板の高さが、設計まであとどれぐらいかをモニター上で確認しながら手動施工を行うもの。
・バックホーマシンガイダンス
バケットの位置が、設計まであとどれぐらいかをモニターで確認しながら手動施工を行うもの。
建機が自分の位置をリアルタイムに知る
ICT建機は、入力された3次元設計データを元に施工を行ったりアシストを行ったりする。これには、リアルタイムかつ精度の高い測位システムが必要だ。自分が今、地理上のどこにいるのか(=設計データ上のどこにいるのか)を、建機自身が自動で把握している必要があるのだ。これには主に次のふたつの技術が使われる。
・トータルステーションを使った測位技術
測量に使うトータルステーションを使用する方法だ。建機に測量用プリズムを設置して、トータルステーションを自動追尾させる。トータルステーションは観測データをリアルタイムに建機に送り続け、建機はそのデータをもとに今自分が設計上のどこにいるのかを把握する。
 トータルステーションを使った測位システムの例。ブレード上にとりつけたマストのプリズムをトータルステーションが自動追尾する。
トータルステーションを使った測位システムの例。ブレード上にとりつけたマストのプリズムをトータルステーションが自動追尾する。
・GNSSを使った測位技術
建機にGNSSの受信機を搭載し、カーナビのようにして自分の位置を知る方法もある。RTK方式と呼ばれるGNSS測量では、現場事務所の屋根などに基地局を設置、基地局からGNSSの補正位置情報を建機とやりとりしながら精度の高い計測ができる。
 GNSSを使った測位システムの例。建機に乗せた移動局と、固定された基地局の補正位置データを使ってより高精度な位置を知る。
GNSSを使った測位システムの例。建機に乗せた移動局と、固定された基地局の補正位置データを使ってより高精度な位置を知る。
このふたつの方式の違いは、その精度だ。GNSSを使った方式ではこぶりな卵1個分の精度の精度、一方、トータルステーションを使った方式では、パチンコ玉1個分の精度で位置の検出ができる。
また、トータルステーションを使った方式では、ICT建機1台ごとに1台ずつトータルステーションが必要だが、GNSS方式では複数のICT建機に対して1台の基地局でまかなうことができる。
建機が自分の姿勢をリアルタイムに知る
建機自身が位置を把握しているだけでは施工することはできない。今、どこをどの程度施工すれば良いのかのデータが必要だ。しかも、地面には凹凸があり、建機の傾きを勘案したデータになっていなければならない。このデータはどうやって得ているのだろうか。バックホーの場合を例にみていこう。
バックホーでは、今、バケットの刃先が設計データ上のどの位置にあり、どんな角度になっているのかが重要だ。それがわかれば、あとは設計データ通りに動かせば良いことになる。バックホーマシンコントロールでは、ブームなどの4カ所に姿勢感知センサーが取り付けてある。これら姿勢センサーの情報から、バックホー自身の傾きや、アームの角度を算出し、刃先の位置や角度を特定しているのだ。
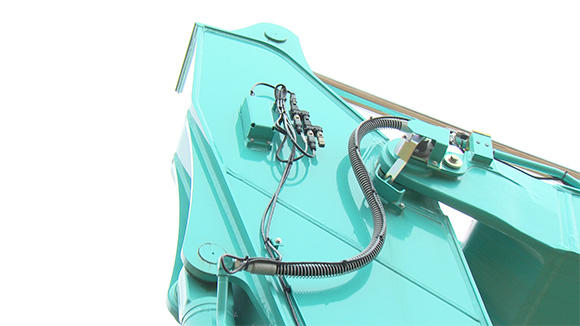 バックホーのアームに取付けられた姿勢感知センサー。
バックホーのアームに取付けられた姿勢感知センサー。
日南茂雄(アクティオ ICT施工推進課):ICT建機は、3次元設計データを入れて、丁張りも補助員も無しに、その通りに施工できる建機です。製造業では3次元の設計データを元にロボットが部品の加工などを行っていますが、同じようなことの土木版、というイメージですね。
マシンガイダンス
マシンコントロールの建機は専用機であり、コストも運用ノウハウもやや敷居が高い。しかし、マシンガイダンスなら一般的なバックホーやブルドーザーに後付けできるシステムもあり、導入はしやすいだろう。アクティオでは、汎用機に取り付けできるバックホーマシンガイダンスのレンタルも行っている。
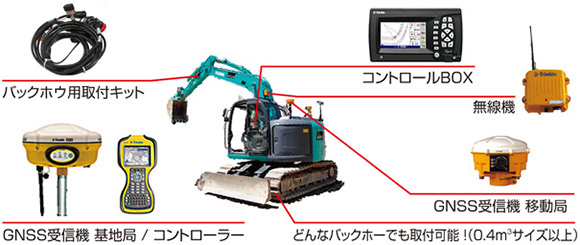 GNSSを利用したバックホーマシンガイダンスのシステム。一般的なバックホーに外付けできる。
GNSSを利用したバックホーマシンガイダンスのシステム。一般的なバックホーに外付けできる。
様々なICT建機
代表的なバックホーとブルドーザー以外にも、様々なICT建機が存在する。
 バックホーマシンコントロール。半自動で施工を行う。
バックホーマシンコントロール。半自動で施工を行う。
 ブルドザーマシンコントロール。半自動で施工を行う。
ブルドザーマシンコントロール。半自動で施工を行う。 GNSS地固め管理。GNSSから位置情報を取得し、ローラーの走行距離から転圧回数を算出。
GNSS地固め管理。GNSSから位置情報を取得し、ローラーの走行距離から転圧回数を算出。 TSマシンコントロールグレーダー。自動追尾トータルステーションを使い、センサーとの組み合わせでブレードの位置を自動制御できる。
TSマシンコントロールグレーダー。自動追尾トータルステーションを使い、センサーとの組み合わせでブレードの位置を自動制御できる。
ICT建機が少子高齢化の現場を守る
今後、土木の現場は急速に人材不足が進むと考えられている。現場の生産性をあげるICT建機を使いこなし、さらにその応用範囲が広げることが、i-Constructionの目的である、少子高齢化時代の土木現場をしっかり守ることにつながるのだ。
日南(アクティオ ICT施工推進課):今、土木の現場では少子高齢化で今、重機に乗ってらっしゃる技能労働者の数がどんどん減っています。今後、今と同じ量の工事をこなそうとするならば、一人が1.5倍の量をこなさなければならなくなると言われています。ICT建機があることによって人材不足を補うことができるわけです。初心者が難しい仕上げ作業をすることもできるようになりますし、ベテランのオペレータさんが使った場合でも、大きく効率がアップします。例えば、従来では、丁張りをみながら、バックホーで法面を切っていくわけですが、結構な頻度で重機を降りてきて丁張りと仕上げ面の確認をするわけです。ICT建機の場合は3次元設計データが入っているので、いちいち重機を降りて確認しなくて済み、さらなる効率アップが期待できます。今後は、こういったICT建機を使いこなすオペレータが重要になっていくのかも知れません。
次回はi-Constructionで変わる出来形管理の実際をみていこう。
※記事の情報は2019年5月17日時点のものです。
〈商品情報〉












![自著を語る[自著で紹介する建設の魅力]](/common/images/side_bnr_books.jpg)
![どぼく偉人ファイル[古今東西のどぼく偉人をピックアップ]](/common/images/side_bnr_greatman.jpg)
![建機の歴史[建機にまつわる歴史を紹介]](/common/images/side_bnr_history.jpg)
![天気の読み方[建設現場で役立つ!]](/common/images/side_bnr_weather.jpg)

