


2023.03.08
ロボットの価値をどこに見いだすか。「必ず動く」で業界への浸透を図る【建設業の未来インタビュー⑩ 前編】 橋梁(きょうりょう)や道路の点検・検査・監視を支援するロボットや建設機械にとって、「必ず動く」ことは特に重要な価値です。社会・産業インフラ向けロボットを開発・提供する株式会社イクシスは、「必ず動く」という価値を提供し、建設業界への浸透を図っています。前編では、同社の代表取締役Co-CEO兼CTOの山崎文敬(やまさき・ふみのり)氏に、同社のビジネスと「必ず動く」ロボットを提供する上での考え方について、お話をうかがいました。
ゲスト:山崎 文敬(株式会社イクシス代表取締役Co-CEO兼CTO)
聞き手:茂木 俊輔(ジャーナリスト)
必ず動くロボットは「機能を絞り込む」ことで生まれる
──1998年に、当時大学生だった山崎さんは株式会社イクシスを設立されました。現在のように、社会・産業インフラの点検・検査・監視を支援するソリューションサービスを提供するようになるまでのいきさつを教えてください。
山崎 もともとロボットが好きで、大学時代はサービスロボットやコミュニケーションロボットの領域を研究していました。起業した時も、これらのロボットは将来、当たり前の存在になると思っていました。ですが、ビジネスとして始めてみると、そう簡単ではないことが分かってきました。
いっぽう、建設業界では、トンネルや橋梁といった社会インフラの老朽化や維持管理の担い手不足などが問題視されるようになっていました。ロボットエンジニアとしてはやはり、社会に役立つロボットを開発・提供していきたいものです。そこで起業間もない時期から、社会インフラの領域に特化した製品の開発・提供を目指すようになりました。
実際、ロボットの受託開発に向け、建設各社にアプローチする中、社会インフラの老朽化や担い手不足を背景とする、生産性の向上や無人化・省人化へのニーズが多く聞かれました。以来、そこに貢献できる領域がある、と注目し続けています。

──建設業界のニーズに応える形で受託開発したロボットには、どのような現場で用いる、どのようなものがあるのですか。
山崎 最初に受託開発したロボットは、高速道路の橋梁を点検するものでした。開発段階でコンセプトに掲げたのは、とにかく「利用してもらえること」です。お客様のニーズに対して機能をミニマム(最小限)に絞り込んで開発したところ、点検現場で思った以上にすんなり動いてくれたのです。それが、お客様にも好評でした。
──建設業界での初めての仕事で現場に喜ばれるロボットを開発できたのですね。
山崎 はい。まずミニマムな機能で利用してもらうというアプローチは間違っていなかった。そう確信を得られました。現場で必ず動けば、単純な機能でも確実に成果を得られます。つまり、お客様に成功体験をもたらします。それが、非常に良かった。そのお客様からはその後も、私たちに前向きな気持ちで接していただけました。
いっぽう、現場で利用してもらえるロボットを開発するには、現場のことを知っている必要がありますから、受託案件でご一緒した方々には積極的に教えを請うようにしました。すると皆さん、非常に親切に支援の手を差し伸べてくれます。その結果、知見がどんどん蓄積され、現場で利用してもらえるロボットをますます開発しやすくなっていきました。
機能をミニマムに絞り込んだロボットを提案すると、お客様から「もっと機能を持たせてほしい」と要望されることが少なくありません。そういう時には、「最初のステップなので、ここからスタートしませんか」と、お伝えしています。単純な機能でも成果を実感していただくと、お客様自らが、ロボットの適切な使い方を真剣に考えるようになるからです。第一歩をどう踏み出すかが、非常に重要だということを実感しました。

ロボットができないことを運用で補う「人協調型」の考え方
──受託開発したロボットに対する評価が、現在のようなソリューションサービスの提供という業態の進化につながったのですね。
山崎 はい。私たちのミッションは、ロボットを仕様書通りに開発することではなく「確実に動くロボットを開発・提供することで現場の役に立つ」ということです。仮に現場で動かないリスクが見込まれるときは、運用で補うことを検討します。そうしてロボットが現場で確実に動くようになると、お客様の目は、ロボットそのものの機能から、ロボット導入の成果に向きます。
例えばデータを取得するロボットであれば、そのデータをどう活用するか、という視点に変わるのです。そうした目線の変化を受け、私たちとしてもロボットをただ開発・提供するだけでなく、ロボットを活用したソリューションサービスの提供まで手掛けよう、と業態を進化させてきたのです。
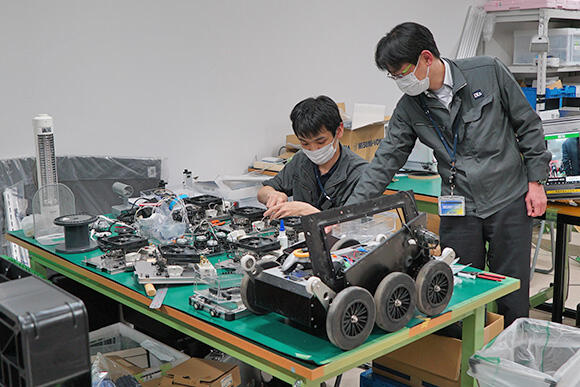 「確実に動くロボットを開発・提供することで現場の役に立つ」というミッションのもと、社内では日々ロボットの改良や新たな開発が行われている
「確実に動くロボットを開発・提供することで現場の役に立つ」というミッションのもと、社内では日々ロボットの改良や新たな開発が行われている
──現場で動かないリスクが見込まれるときは、運用で補うという話がありました。これは例えば、どのような場面でどのような運用をするのですか。
山崎 運用で補うというのは、人間との協調作業を前提に、ロボットでやれないことは人間がサポートする、ということです。私たちはこれを「人協調型」と呼んでいます。
構造物の床面を走り回るロボットを例に取りましょう。鉄骨造でも鉄筋コンクリート造でも、床面には何かしら段差があるものです。ロボットだけで対応させるには、段差を検知するセンサーを装着し、検知したらモーターの駆動力で段差を乗り越えさせる必要があります。当然、センサーもモーターも数が必要になり、故障リスクが高まります。
しかし、現場にロボットを持ち込んでいる以上、そこには人間がいます。段差を乗り越えるという、ロボットにとって難しいタスクがあるときには、そこにいる人間が手を差し伸べて、段差を乗り越えさせればいい。人協調型を前提にすると、段差を検知し乗り越えるという機能は追加せずに済みます。
 株式会社イクシスの製品であるワイヤー吊り下げ型目視点検ロボット「Rope Stroller」は、ロボットでやれないことは人間がサポートする「人協調型」を前提に開発された(画像提供:株式会社イクシス)
株式会社イクシスの製品であるワイヤー吊り下げ型目視点検ロボット「Rope Stroller」は、ロボットでやれないことは人間がサポートする「人協調型」を前提に開発された(画像提供:株式会社イクシス)
別の例を、当社の製品であるワイヤー吊り下げ型目視点検ロボット「Rope Stroller」を引き合いにご説明しましょう。このロボットは、例えば橋梁の径間にワイヤーを架設し、そこを滑らせて床版裏面の写真を撮影するものです。これにも、人協調型の機能を加えています。
橋梁の下はただでさえ暗いため、強風や走行車両の振動でロボットが揺れると写真撮影時の手ぶれと同じ現象が起きます。そうなると明瞭な画像を撮影できなくなり、点検用として役に立ちません。通常は制振機能を盛り込み、手ぶれ防止を図りますが、想定以上の風は防ぎ切れません。手ぶれ撮影になってしまうと、その箇所を再撮影するという二度手間が生じてしまいます。
そこで新たに加えた人協調型の機能は、揺れをセンサーで検知して、一定以上の風速に達した場合は、人間が遠隔操作でシャッターボタンを押せなくする、というものです。部品としては、風速を検知する振動センサーを取り付けただけ。安価な機能追加です。しかも、風速が手ぶれのおそれのない速さ以下に落ちてから、人間が判断して点検ロボットを再スタートさせますから、継続して明瞭な画像が撮影可能です。人間の判断で撮影の中断・再開を決めるため、失敗もありません。
もちろん将来的には、そうした人間の判断が不要になり、無人化を実現できると思いますが、今の段階ではこうした人協調型の考え方で臨んでいます。この考え方を前提にすると多くの課題を乗り越えられますし、撮影後の画像処理を自動化するなど後処理業務にはまだ効率化を図れる余地が多く見込めるため、そこに手を加えれば業務全体として一定の成果は得られるからです。

重要なのは「ロボットの価値をどこに見いだすのか」ということ
──ロボットに何を求めるか、そこをあらためて見つめ直す必要がありそうです。
山崎 そうですね。ロボットというのは、コンピューターとモーターとセンサーを搭載した機械であるとはいえ、必ずしも人間以上の効率や精度で作業をこなすわけではありません。いわゆるお掃除ロボットにしても、人間が掃除機をかければ20分程度で終わる広さの家でも、もっと時間がかかったりします。それでもヒット商品として売れ続けているのは、留守中に掃除してくれるからです。だから、時間は別にかかってかまわないのです。
同じようなことが建設業界で用いられるロボットにも言えて、「ロボットを現場に導入することの価値とは何か」が問われています。今、社会インフラの設計・施工や維持管理といった業務の作業環境は、有人を前提に最適化されているため、ロボットにとって必ずしも最適な環境とは限りません。それだけに、過度な期待は禁物です。ロボットの導入を進めていくなら、その価値をどこに見いだすのか、しっかり整理しておくことが重要です。
※記事の情報は2023年3月8日時点のものです。

- 山崎 文敬(やまさき・ふみのり)
株式会社イクシス代表取締役Co-CEO兼CTO(共同経営者)
1998年、大学在学中に株式会社イクシスを設立。2000年より科学技術振興事業団ERATO北野共生システムプロジェクト技術員を務め、ヒューマノイドロボ「PINO」を開発。2003年より阪大フロンティアリサーチ研究機構(阪大FRC)特任研究員、2011年より認定NPO法人ロボティック普及促進センター副理事長、2013年より日本ロボット学会代議員を務める。2018年9月に代表取締役Co-CEO兼CTO(共同経営者)に就任。受託開発を主業とする技術集団企業から各業界の本質的問題を解決する事業会社へと新たなスタートを切り、業務を推進する。 
- 茂木 俊輔(もてぎ・しゅんすけ)
ジャーナリスト。1961年生まれ。85年に日経マグロウヒル社(現日経BP)入社。建築、不動産、住宅の専門雑誌の編集記者を経て、2003年からフリーランスで文筆業を開始。「日経クロステック」などを中心に、都市・不動産・建設のほか、経済・経営やICT分野など、互いに関連するテーマを横断的に追いかけている。
【後編】へ続く
〈YouTube〉
オリジナル動画「【建設業の未来インタビュー⑩】」前編をご視聴いただけます!












![自著を語る[自著で紹介する建設の魅力]](/common/images/side_bnr_books.jpg)
![どぼく偉人ファイル[古今東西のどぼく偉人をピックアップ]](/common/images/side_bnr_greatman.jpg)
![建機の歴史[建機にまつわる歴史を紹介]](/common/images/side_bnr_history.jpg)
![天気の読み方[建設現場で役立つ!]](/common/images/side_bnr_weather.jpg)

