


2024.01.31
遠隔監視で建設現場の「ダイバーシティー化」を目指す【建設業の未来インタビュー⑬ 後編】 「世界一ひとにやさしい現場を創る」をミッションに、建設現場向けの省力化・省人化ソリューションを提供する建ロボテック株式会社。2020年から提供する「鉄筋結束トモロボ」は、現場からのフィードバックをもとに改良を積み重ねてきました。その改良内容とミッション達成に向けた今後の展開について、前編に引き続き代表取締役社長兼CEOの眞部達也(まなべ・たつや)氏にお聞きしました。
文:茂木 俊輔(ジャーナリスト)

発想の転換で施工精度のブレに対応
──「鉄筋結束トモロボ」は建設現場で実際にどの程度使われているのですか。
これまでの使用実績は、建築工事と土木工事合わせて128現場(2023年11月末時点)です。前編でご紹介した「トモロボオペレーター」の登録者を見ると、初期はゼネコンの現場監督が目立ちましたが、最近は鉄筋工事会社の若手作業員が増えています。僕たちがユーザーと想定している層にまで、ようやく広がってきました。
──「鉄筋結束トモロボ」のバージョンアップを重ねて、使い勝手が良くなってきたという事情もあるかもしれませんね。具体的には、どのような点を改めてきたのですか。
ひとつは、配筋された鉄筋の上をどこまで安定して走行できるか、という点です。配筋するのは人間ですから、施工精度にはどうしてもブレが出ます。配筋の間隔を仮に200mmとすると、施工精度は±10%の誤差まで認められているので、180mmでも220mmでもよいわけです。最大40mmの違いです。当初、「鉄筋結束トモロボ」は鉄筋2列を線路のようにして進む4輪車だったのですが、それでは施工精度のブレに対応できません。
そこで、発想を根本から改めたんです。真ん中の鉄筋を中心にやじろべえのように左右のバランスを取りながら走行させるのはどうか、と。鉄筋3列の上を進む6輪車の発想です。そうすれば、施工精度のブレを気にせずに走行できます。
 正面から見た「鉄筋結束トモロボ」。中央下部にあるローラーで左右のバランスを取りながら走行する
正面から見た「鉄筋結束トモロボ」。中央下部にあるローラーで左右のバランスを取りながら走行する
──2023年3月には、トモロボの最新バージョンをリリースされました。具体的には、どのような点をバージョンアップしたのでしょうか。
脱線防止機能を改良しました。「どれだけ脱線せずに安定して走行できるか」という視点で改良を行い、脱線してしまう回数が1日当たり10回未満というレベルに達しました。脱線したロボットをまた鉄筋の上に載せ直すのは作業員ですから、その回数は少ないに越したことはありません。理想は1日当たり3回までで、それを目指して現在も日々改良を重ねています。
──ロボットである以上、現場の生産性も気になるところです。過酷な労働環境下、人間が無理な姿勢で鉄筋を延々と結束し続ける、その代役を果たしてくれるほかに、生産性という観点からもメリットが求められるのではないですか。
その点を踏まえて、最新バージョンでは結束のスピードを約1.3倍に上げました。それまでは1日(8時間)当たり8,000カ所でしたが、高速化した結果、1日(8時間)当たり10,400カ所を実現できたのです。

駐輪場システムから着想を得た結束スピードの高速化
──高速化はどのようにして実現したのですか。
まず「鉄筋結束トモロボ」の動きからご説明しましょう。このロボットは、左右に取り付けた自動結束機を持ち上げながら配筋された鉄筋の上を走行し、センサーで鉄筋の交点を見つけると、結束機を結束可能な位置まで下ろします。結束機を下ろしきると、トリガーを引き、鉄筋を結束する、という作業を繰り返します。この一つひとつの作業の間に若干の時間があるんです。
その時間をなくすだけでなく、作業を少しずつ重ね合わせることで、より時間短縮を図っています。例えば、鉄筋の交点を見つけ終えてから結束機を下ろすのではなく、ある程度見つかったらもう下ろし始める、といった具合です。
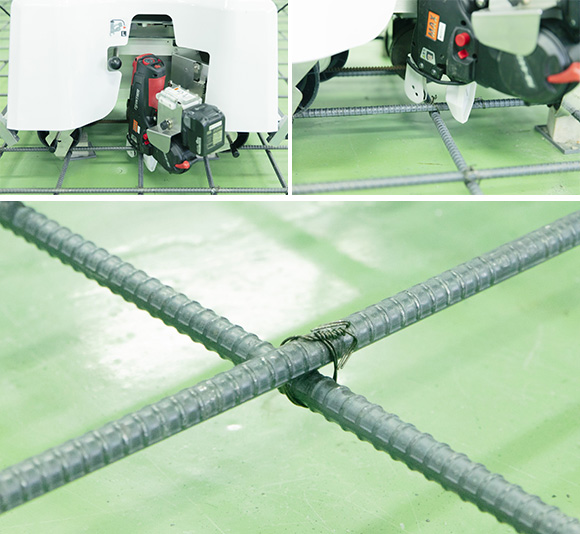 (左上)鉄筋の交点を見つけると、左右に取り付けられた自動結束機が結束可能な位置まで降りる (右上)結束を終えると、結束機が自動で上がるようになっている (下)「鉄筋結束トモロボ」による結束箇所。しっかりと結束されているのが分かる
(左上)鉄筋の交点を見つけると、左右に取り付けられた自動結束機が結束可能な位置まで降りる (右上)結束を終えると、結束機が自動で上がるようになっている (下)「鉄筋結束トモロボ」による結束箇所。しっかりと結束されているのが分かる
これは、地下の駐輪場に地上から自転車を出し入れするシステムから着想を得ています。このシステムが紹介されていたニュース映像をテレビで見て、その動きに非常に興味を持ちました。内部の仕組みが分かる見学用のシステムを見させてもらったところ、システムの動きがすごかったんです。
人の手を離れた自転車は、システム内に吸い込まれながら、地下に行きます。ものすごい勢いなんですが、自転車が壊れないギリギリのスピードで動かしているんです。なぜそれほどまでスピードを上げるのか、システムの開発会社に聞いたところ、「自転車を取り出そうと思ってボタンを押してから15秒以内に出てこないと、利用者はみんなイライラしますからね」とのこと。「これだ!」と思いましたね。
僕らはそれまで、「ロボットは1つの動作を終えてから次の動作に移るものだ」と考えていました。しかし、実際はそうじゃない。1つの動作を終えないうちに、次の動作に移ってもいい、動きを重ね合わせることが生産性の向上につながる、と気づかされました。会社に戻ってすぐ、ロボットの改良に着手しましたね。
それともうひとつ、モーターの回転数をギリギリまで上げました。このモーターは、ロボットの走行や自動結束機の上げ下げをつかさどるものです。モーター自身の耐久性やリチウムイオン電池の持ちを考えると、あまり負荷をかけたくないのですが、全ての動きを加速するため、許される負荷の範囲内でギリギリまで上げています。
──生産性の向上という観点から、定量的な目標はお持ちですか。
「人介在率」という指標を設けています。人間がロボットの面倒を見ている時間の割合ですね。この時間、人間は自身の担当作業ができないため、人介在率の引き下げは生産性の向上を意味します。この数値をいま、6%まで下げられています。
ロボットの面倒としてこれまで時間がかかっていたのは、鉄筋の結束に用いるワイヤーの補給作業です。その補給作業に掛かる手間を大幅に減らしました。そのほか、先ほどお話ししたように、脱線トラブルに対応しなければいけない手間も大幅に減らしました。この数値は10%未満であれば十分だと考えています。それ以上削ろうとすると、経済合理性を犠牲にせざるを得ないでしょうから、ひとまず現状のまま据え置く予定です。
グレーゾーン解消制度を活用し、遠隔監視を実現できる土壌を整える
──省力化ソリューションの提供として、今後はどのような展開をお考えですか。
ひとつは、対象工種の拡大です。鉄筋工事以外の工種にも提供できるような省力化ソリューションを提供していきたいですね。
もうひとつは、遠隔監視の実現です。家庭の事情で在宅でしか働けない人、身体的なハンディキャップがあり、安全管理上、建設現場に入場できない人、そういう人が遠隔監視で建設ロボットの動きを監視し、建築工事や土木工事の生産活動に携われる仕組みづくりを検討しています。
当社は昨年、経済産業省が推進するスタートアップ企業の育成支援プログラム「J-Startup」に選定されたので、法規制の解釈や適用の有無を確認できるグレーゾーン解消制度を活用しやすくなりました。この制度を活用しながら、遠隔監視を実現できる土壌を整えたいですね。
遠隔監視が可能になれば、建設現場のダイバーシティー化を進められます。建設現場に海外から参画するのも夢ではありません。今後は、そうした未来の実現に役立つ技術開発に取り組んでいきたいと考えています。

──壮大な構想ですね。今後のご活躍、楽しみにしています。ありがとうございました。
※記事の情報は2024年1月31日時点のものです。
〈商品情報〉

- 眞部 達也(まなべ・たつや)
建ロボテック株式会社 代表取締役社長兼CEO
1976年生まれ。香川県出身。高校を卒業して調理師専門学校に進んだ後、レストランに就職。その後、父親が経営する有限会社都島興業に入社。建設現場の非効率性という問題を解決するため、2013年にEMO株式会社を設立。現場の作業効率化を大きく変えるVバースペーサーなどの製品を開発する。さらに、4年を費やした「鉄筋結束トモロボ」の開発を機に2019年、建ロボテック株式会社へ名称変更。「鉄筋結束トモロボ」は2021年、公益社団法人発明協会主催「令和3年度四国地方発明表彰」で最高位の「文部科学大臣賞」受賞。2022年りそな中小企業振興財団・日刊工業新聞主催「第34回 中小企業優秀新技術・新製品賞」でも同じく最高位の「中小企業庁長官賞」を受賞。












![自著を語る[自著で紹介する建設の魅力]](/common/images/side_bnr_books.jpg)
![どぼく偉人ファイル[古今東西のどぼく偉人をピックアップ]](/common/images/side_bnr_greatman.jpg)
![建機の歴史[建機にまつわる歴史を紹介]](/common/images/side_bnr_history.jpg)
![天気の読み方[建設現場で役立つ!]](/common/images/side_bnr_weather.jpg)

