


2026.02.25
汎用物理作業プラットフォーム全体構想の実現に向け10の基盤づくり。ロボット活用で人間を苦役から解放したい【建設業の未来インタビュー⑱ 後編】 汎用ロボットのプラットフォーマーを目指すベンチャー企業、株式会社人機一体。同社では、汎用ロボットを生み出す上での重点実装分野を10に整理し、製品化や実用化を担う企業らと共に各技術の開発を進めています。根底にあるのは、ロボットを道具として活用することで人間をあらゆるフィジカルな苦役から解放したい、という思い。汎用ロボットの開発に向けた道筋や理想、さらに今後のビジネス展開を、同社代表取締役社長の金岡(かなおか)博士にお聞きしました。
文:茂木 俊輔(ジャーナリスト) 写真:鈴木 拓也

汎用ニーズにも応える技術開発で、市場性を見出す重要性
――前編でお聞きした西日本旅客鉄道株式会社(JR西日本)や株式会社竹中土木との共同開発も、人機一体で目指している汎用物理作業のプラットフォーマーとしての取り組みのひとつ という位置付けになるのですか。
はい、そうです。汎用物理作業のプラットフォームを構成する重点実装分野を私たちは今、10に分類・整理しています。「人機ラティス」「人機回転駆動ユニット」「人機並進駆動ユニット」「人機電油駆動ユニット」「人機リスト」「人機アーム」「人機カート」「人機ブームレイバー」「空間重作業人機」「人型重機」です。それぞれ、人機一体が主幹事企業となり、最終製品メーカー、最終製品ユーザー、要素部品メーカー、大学などと共に、潜在市場の顕在化と、その市場にマッチする製品の開発を並行して進めます。JR西日本や竹中土木との技術開発は、このうち「空間重作業人機」に該当します。
前編で説明したプラットフォームとアプリケーションの関係に立ち返ると、JR西日本や竹中土木といった個別企業のニーズは、アプリの開発でこそ満たされるものです。しかし、私たちが開発しようとするのはあくまで、プラットフォームなのです。
個別企業のニーズに対応して開発するのはもちろん、それと同時に周辺の汎用ニーズに対応したものにすることも心掛けます。そうすることで、例えば鉄道会社ならどこでも応用・活用できるロボットになり、場合によっては鉄道分野を超えた広がりを持てる。そうなれば市場が広がり、最終製品メーカーとしてもビジネスとして乗り出しやすくなるはずです。
一見、人機一体はJR西日本や竹中土木のニーズに合わせて専用ロボット開発を進めているように映るのでしょうが、必ずしもそうではありません。もちろん、顧客のニーズを満たすロボットを開発しますが、それは汎用ロボットとしての物理作業プラットフォームを構築し、そこに特定作業用の専用アプリを入れることで実現されています。すなわち、私たちはもう一段上のレイヤーから、汎用性を探っているのです。
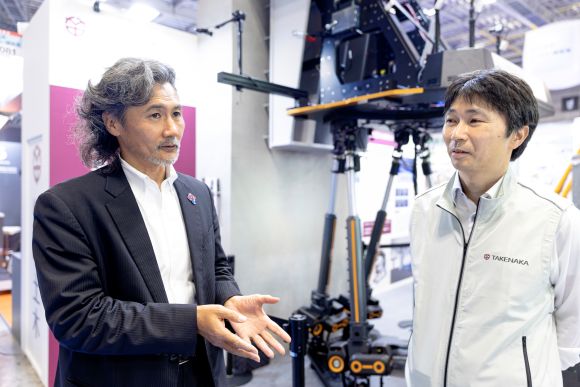 「ハイウェイテクノフェア2025」にて、竹中土木の担当者と実証試作機について話す
「ハイウェイテクノフェア2025」にて、竹中土木の担当者と実証試作機について話す
――人機一体で思い描くグランドデザインとして、まず汎用物理作業プラットフォームという未来図があり、その実現に向けて10に分類・整理される重点実装分野の構築を、製品化・実用化を担う企業とともに進めている、という形ですね。
はい。そうでないと、ただのロボット受託開発会社になってしまいます。短期的な利益だけを追求するなら、むしろその方がいいのでしょうが、スタートアップとしての将来性・発展性が見込めませんし、そもそもそんなことをするために人機一体を立ち上げたわけではありません。私たちとしては、企業との連携で技術領域を次第に広げ、この範囲であれば汎用ロボットがもう現場で実用されている、というような形でビジネスを進めたいのです。
人間には不可能な超能力をロボットに持たせることが大事
――人機一体は2015年10月に創業しています。そもそも、どんな思いから今のようなロボット開発に乗り出したのですか。
きっかけは、2011年の東日本大震災の影響で発生した原子力発電所の事故です。この時、事故現場でロボットがどの程度活躍できたでしょうか。
当時、ロボット工学の研究者として日本のロボット工学は世界のトップレベルであると自負していました。事故発生後、ロボットがヒーローのように登場し、事態の収拾に動いてほしい、と期待しました。それができないことは研究者として分かっていましたが、やはり期待してしまうのです。でも、案の定、そうはならなかった。
現場で役立つロボットを開発する技術は、当時既にありました。しかし、原発事故でロボットは十分に活躍できなかった。なぜか。それは、社会実装されていないから。つまり、技術はあっても製品として普及していないからです。当時、私は研究者であり、社会実装は自分の仕事ではない、という「他人事」のような意識がありました。そんな自分に対する怒りが、研究者からベンチャー企業経営者に転じた動機です。
――社名の人機一体というネーミングは、1990年代のテレビアニメ「新世紀エヴァンゲリオン」の世界観と重なります。どんな思いを込めたのですか。
字面を見ての通り、人間と機械が一体になる、ということです。ただ、サイボーグのような形で一体になるわけではありません。神経接続もしていませんので、シンクロ率もありません。物理的な接続(つまり操縦)による物理作用としての一体化であり、主役はあくまで人間です。機械に使われるのではなく、機械が勝手に動くのでもなく、人間が、自らの体の一部となったロボットを自らの意思で操る。それはまるで「人馬一体」のように、人は人、馬は馬でありながら、一つのシステムとして完成している。そんな理想を表現するのが「人機一体」です。
その考え方は、社名のロゴにも表現されています。よく見ると、「人」の方が「機」より大きい。人間のそばに、使いやすいロボットを道具として置いておく、そんなイメージです。ロボットを道具として使いこなす世界観を思い描いています。
 滋賀県草津市にある人機一体の本社「秘密基地 人機一体」外観。思いもよらぬ住宅街の真ん中に佇む
滋賀県草津市にある人機一体の本社「秘密基地 人機一体」外観。思いもよらぬ住宅街の真ん中に佇む
もう一つ、横文字ではなく、日本語であることにも、大きな意味があります。ロボットが登場するテレビアニメを見て育った世代として、人間がロボットに乗り込んで活躍するというコンセプトは日本発と自負しています。コンセプトを社会実装するのは日本の企業でありたい。そんな気持ちから、アルファベットでもカタカナでもなく、日本語の漢字表記を選びました。
――人間が主役でロボットは道具という話がありました。道具としてのロボットは、人間にとってはどんな価値を持ちますか。
最近の流れにAIロボットの開発があります。あれはやはり、人間に近いものをつくろうとしているように見えます。人間と同じような人型ロボットを開発し、それに人間の作業を代替させる。それは別に、間違ってはいません。
しかし、ロボットがなぜ役に立つかという視点に立つと、それは人間に近いからではなく、むしろ人間と異なるからではないか、とみています。だからこそ、役割分担をしながら人間にできないことをやってもらえる。ロボットを役立つ存在にするには、人間にはない能力、言うなれば超能力を持たせることが大事です。
その結果、どんな価値が生まれるか。それは、「あまねく世界からフィジカルな苦役を無用とする」ことです。苦役は、人間が本来やるべきではない作業です。担い手が人間以外に考えられないため、人間が仕方なくやっているに過ぎません。そんな作業を肩代わりすることで人間を苦役から解放するロボットを開発するのが、技術面からもビジネス面からも合理的です。
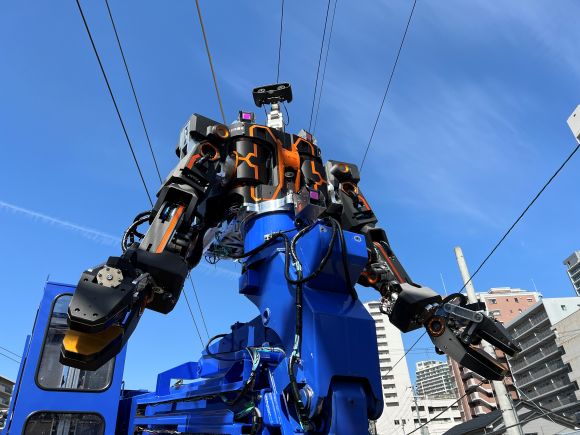 「力・トルク制御技術」「パワー増幅バイラテラル制御技術」などの人機一体独自の先端ロボット工学技術が搭載される(写真提供:人機一体)
「力・トルク制御技術」「パワー増幅バイラテラル制御技術」などの人機一体独自の先端ロボット工学技術が搭載される(写真提供:人機一体)
ロボットレンタルやオペレーター教育に見出す市場性
――建設分野では苦役として、高所など危険な箇所での重作業があります。
そうですね。私たちは、技術的なアドバンテージを生かし差別化を図るためにも、大きな力を出せる重作業ロボットにフォーカスしています。
もともと私たちは、ロボットを情報処理より物理作業を担う存在と捉えています。上位の価値判断は人間が下す。その判断に基づく物理作業を担う存在というわけです。ただ重作業をこなすために力を制御する要素技術を開発した2005年当時は、まだそれを世の中の役に立てようという発想はありませんでした。パワードスーツのような装置を開発すれば面白いことができそうという期待感があっただけです。
 (写真提供:人機一体)
(写真提供:人機一体)
――それが、原発事故をきっかけに変わった、と。ロボット開発に寄せる思いはよく分かりました。今後のビジネス展開については、どうお考えですか。
レンタルサービスの必要性を痛感しています。最終製品のメーカーやユーザーを巻き込んで高品質のロボットを開発しさえすれば市場は自ずと開けると考えていましたが、どうもそうではない。
価格は決して安くないし、メンテナンスの手間もかかる。資産として自社で保有するのではなく、借りた方が合理的という判断が、重作業を担う企業には働きます。そういう企業にロボットを提供する。場合によっては、オペレーターも教育して現場に派遣する。そんなサービス展開です。プラットフォーマーとして市場で勝者になるには、そこまで手掛ける必要性を感じています。
そこで人機一体では、人機プラットフォームのさらなる展開として、レンタルサービスを含めた「人機運用事業」の構想を進めています。これが本格化すれば、汎用物理作業プラットフォームの社会実装に向けて、さらに大きく前進できると考えています。インフラ事業者だけではなく、レンタルサービス事業者とも連携できればいいですね。
※記事の情報は2026年2月25日時点のものです。

- 金岡(かなおか)博士
株式会社人機一体代表取締役社長 兼 立命館大学 先端ロボティクス研究センター 客員教授
京都大学博士(工学)取得後、立命館大学理工学部ロボティクス学科助手を経て 2003 年に立命館大学理工学部ロボティクス学科講師に就任。力学ベースのロボット工学技術の実装について研究開発を行なう傍ら 2007 年にマンマシンシナジーエフェクタズ株式会社を設立した。東日本大震災時、ロボット工学技術が現場で十分に活用されていないことに無力感を覚え事業を本格化。その決意表明として 2015 年に商号を株式会社人機一体に変更した。知的財産を活用した独自の課題解決型サービス、ビジネスモデルである「人機プラットフォーム」を考案し、人間機械相乗効果器、すなわち人機の社会実装に向けて邁進する。












![自著を語る[自著で紹介する建設の魅力]](/common/images/side_bnr_books.jpg)
![どぼく偉人ファイル[古今東西のどぼく偉人をピックアップ]](/common/images/side_bnr_greatman.jpg)
![建機の歴史[建機にまつわる歴史を紹介]](/common/images/side_bnr_history.jpg)
![天気の読み方[建設現場で役立つ!]](/common/images/side_bnr_weather.jpg)

